「无人机③」飞控硬件与传感器系统
1. 飞控结构与数据流
飞控系统(Flight Controller, FC)是无人机的“大脑”,负责接收传感器信息、进行状态估计、计算控制量,并最终驱动电机或舵机执行动作。要理解一台无人机如何保持稳定飞行,我们首先要弄清楚飞控的内部结构组成与数据流动路径。
1.1 模块组成:从“感知”到“执行”
一个典型的飞控系统由四大核心模块构成,每个模块既有明确的功能分工,又通过标准化接口实现数据协作。
| 模块 | 主要组成 | 作用 | 典型接口 |
|---|---|---|---|
| 主控单元(MCU) | 主处理器、存储器、定时器、DMA控制器 | 执行飞行算法、任务调度、状态估计与控制输出 | SPI、I²C、UART、CAN、PWM、ADC |
| 传感器模块 | IMU(陀螺仪+加速度计)、气压计、磁力计、GPS | 获取姿态、速度、高度、方位与位置信息 | SPI(IMU)、I²C(气压计/磁力计)、UART/CAN(GPS) |
| 通信模块 | 遥控接收机、数传模块(地面站通信) | 人机交互:接收飞行命令、上传遥测数据 | UART、CAN、无线链路 |
| 执行器模块 | 电调(ESC)、舵机 | 根据控制信号执行推力或舵面动作,实现飞行姿态调整 | PWM、DShot、CAN |
飞控系统从结构上可以理解为“感知—决策—执行”的闭环系统。传感器负责“观察世界”,主控负责“决策”,执行器则负责“行动”。通信模块贯穿其中,维持与操作者或上位机的双向联系。
1.2 信号流描述:无人机如何“思考与行动”
飞控内部的数据流是一条完整的控制闭环。可以概括为:传感器采集 → 主控计算 → 控制信号输出 → 执行机构动作。这一链路必须在毫秒级内完成,且周期稳定、时延可控。下面从工程角度分步解析。
1.2.1 信号类型与特征
在深入数据流之前,首先要理解飞控系统中信号的物理形态。不同模块间传输的数据既有逻辑差异,也体现为电气层面的信号特性。按传输方式可分为三类:
- 模拟信号(Analog Signal)
以连续电压或电流表示物理量,如电池电压、气压计输出;响应快但易受噪声干扰;需经 ADC(模数转换器) 采样转换为数字量后才能处理。 - 数字信号(Digital Signal)
采用离散逻辑电平(高/低)编码,通过 I²C、SPI、UART、CAN 等总线传输,抗干扰能力强,适合中高速通信。是飞控主控与传感器、外设通信的主要形式。 - PWM 控制信号(Pulse Width Modulation)
以脉冲宽度的占空比表达控制量,用于电调(ESC)或舵机控制;典型输出频率为 50–400 Hz;对定时精度要求极高,是“算法结果转化为动作”的最终输出形式。
这三类信号构成飞控系统的物理通信层:模拟信号用于感知,数字信号用于传输,PWM 信号用于执行。 主控通过 ADC(模数转换器)、定时器和通信外设统一管理这些信号,实现从采样、计算到控制输出的完整闭环。
1.2.2 传感器采集阶段
各类传感器通过不同总线与主控相连:
- IMU(惯性测量单元):通过 SPI + DMA 高速传输,采样频率可达 1 kHz 以上,是姿态估计的核心输入;
- 气压计、磁力计:多使用 I²C 接口,数据速率较低(约 100 Hz),用于辅助高度和航向估计;
- GPS 模块:通过 UART 或 CAN 接口通信,更新率一般为 5–20 Hz;
- 电压、电流传感器:输出模拟信号,经 ADC 转换后用于功率与电池监控。
在工程实践中,为了避免主控被频繁中断,传感器数据的传输通常采用 DMA(Direct Memory Access) 方式:数据直接写入内存缓冲区,等 DMA 把整批数据准备好、触发“完成中断”时, CPU才会处理结果,这样可以显著降低抖动和计算负担。
1.2.3 主控计算阶段
主控单元(MCU)是飞控的核心处理平台,负责完成以下任务:
- 数据预处理与时间同步:对传感器数据进行滤波、去偏置、坐标对齐,并根据统一时钟打上时间戳;
- 状态估计(State Estimation):通过算法(如互补滤波或 EKF)融合 IMU、气压计、磁力计、GPS 的信息,得到飞行器的姿态、速度与位置;
- 控制律计算:依据目标姿态或位置,计算所需的力矩与推力输出;
- 任务调度(RTOS):飞控通常运行在实时操作系统(RTOS) 上,各任务按优先级定期执行,确保控制周期稳定(如 1 kHz 姿态环、100 Hz 位置环、10 Hz 通信任务)。
在任务调度层面,RTOS 提供精确的周期触发与优先级管理,而 DMA 负责底层数据搬运,两者协同可保证高频实时任务不被通信或日志等低优先任务打断。
举例:
IMU 以 1 kHz 采样率通过 SPI 接口输出数据,由 DMA 自动搬运至缓存;
RTOS 以 1 kHz 控制循环频率调度姿态控制任务,从缓存中读取最新有效样本并执行角速度环 PID 计算;
控制量经 PWM(400–500 Hz)或 DShot(最高 1200 Hz)协议发送至电调(ESC),驱动电机执行响应。
整个环路时延通常控制在 2 ms 以内,抖动(jitter)小于 0.5 ms,即可实现稳定悬停。
1.2.4 控制信号输出阶段
主控根据计算结果,将控制量转化为电机或舵机的可执行信号:
- PWM 信号:传统方式,通过定时器输出,占空比对应推力大小;
- DShot 协议:数字化 PWM,抗干扰能力强,带 CRC 校验;
- CAN 总线驱动:用于大型或高可靠性平台,可实现多执行器同步控制与状态回传。
信号输出要求精确同步、无阻塞,故控制任务通常直接由定时器中断触发,确保固定控制周期。
1.2.5 执行机构动作阶段
电调(ESC)接收控制信号后,调节电机电流,实现转速变化;舵机则改变舵面角度。所有执行器共同作用,使无人机在三个轴向(滚转、俯仰、偏航)上保持平衡或完成机动。飞控此时会持续监测反馈(如电机转速、供电电压等),并记录日志,用于飞行稳定性评估与后期分析。
1.3 数据流与任务流的协同
在软件实现层面,飞控的数据处理可视为两条并行但紧密协作的主线:
- 数据流(Data Flow):传感器数据通过 DMA → 缓存 → 估计 → 控制 → 输出的闭环路径;
- 任务流(Task Flow):由 RTOS 管理,按优先级定时调度各个功能任务。
两者协同可形成如下层次结构:
| 层级 | 主要内容 | 周期频率 | 优先级 |
|---|---|---|---|
| 快速控制层 | IMU采样、状态估计、姿态控制、PWM输出 | 500–1000 Hz | 高 |
| 慢速任务层 | GPS更新、高度控制、通信交互、日志记录 | 10–100 Hz | 中 |
| 后台服务层 | 参数管理、系统监测、故障检测 | 1–10 Hz | 低 |
这种分层设计保证了关键控制环的实时性,同时让通信、记录等后台任务不会干扰飞行稳定。
1.4 工程思考与实践建议
飞控系统属于高实时性、强耦合的嵌入式控制系统。理论模型可指导设计,但真正决定无人机能否稳定、安全运行的,是工程实现的细节。下面我们从时间、数据、任务与安全四方面总结飞控开发的核心原则。
1.4.1 统一时间基准
多传感器的采样频率与通信延迟各不相同,若无统一时基,融合结果将出现时间错位,导致姿态抖动或漂移。飞控应以 MCU 的高精度定时器或独立时钟为全系统时间基准,传感器采样后立即打上时间戳。外部时钟(如 GPS)可用于周期漂移校正,异步量测通过插值或延迟补偿对齐。时间一致性是高精度状态估计的前提。
1.4.2 DMA 与中断最小化
IMU 等高频数据流应通过 DMA 自动搬运至缓存,CPU 只处理算法计算。中断仅用于通知数据到达,不执行逻辑运算。常用“双缓冲”结构避免读写冲突;关键传感器应独占高速总线。DMA 负责“搬数据”,CPU 专注“算控制”,两者分工清晰可确保系统高效稳定。
1.4.3 RTOS 优先级分层
实时操作系统的任务优先级直接决定系统响应确定性。姿态控制与 IMU 采样属硬实时任务,应最高优先级;状态估计和位置控制次之;通信与日志位于低优先级异步执行。RTOS 调度应由硬件定时器驱动,任务间尽量以环形缓冲或消息队列通信,避免互斥锁阻塞。定期监控任务周期与堆栈余量,可防止过载或死锁。
| 优先级 | 任务类别 | 典型频率 | 说明 |
|---|---|---|---|
| 高 | 姿态控制环、IMU采样 | 500–1000 Hz | 影响飞行稳定性 |
| 中 | 状态估计、位置控制 | 100–500 Hz | 可容忍少量延迟 |
| 低 | 通信、日志、监控 | 1–100 Hz | 后台任务,异步执行 |
1.4.4 防护与冗余设计
飞控需具备自检测与自恢复能力,防止局部故障扩散。
- 看门狗:硬件监测系统运行,超时自动复位。
- 任务健康监测:周期异常触发保护模式(如降推、返航)。
- 飞行日志:异步记录传感器与控制数据,支持回溯。
- 冗余与降级:关键传感器双路设计,电压过低时自动限推。
这些机制构成飞控的安全底线,使系统在异常环境下仍保持可控与可追溯。
小结
本章从系统架构的角度,梳理了飞控的主要模块与信号流动路径。可以看到,无人机的“思考过程”实质上是一次高速的数据闭环:传感器感知环境 → 主控计算姿态与控制量 → 执行器响应指令 → 实际动作反馈至传感器。
这一链路的时延、抖动与可靠性,直接决定了飞控的性能与飞行稳定性。在此基础上,下面我们将进一步深入——解析主控与通信接口的实现,探讨如何通过硬件总线(SPI、I²C、UART、CAN)和任务架构,使数据流在实时性与可扩展性之间取得工程上的最佳平衡。
2. 主控芯片与总线
飞控系统的性能与可靠性,取决于两个关键部分:主控芯片的计算能力和通信总线的设计效率。主控芯片负责完成传感器数据融合、姿态控制和任务调度,是系统的“大脑”;而通信总线则承担各模块之间的数据传输,是飞控的“神经网络”。二者的合理搭配,决定了一台无人机在空中的反应速度与稳定性。
2.1 主控芯片特性
当前主流飞控系统普遍采用 STM32 系列微控制器(MCU),其中以 F4、F7、H7 三大系列最为常见。它们在性能、架构和功能上各有侧重,几乎构成了从入门级到高性能飞控的完整梯度。
2.1.1 系列特征与性能差异
| 特性 | STM32F4 | STM32F7 | STM32H7 |
|---|---|---|---|
| CPU 内核 | Cortex-M4 | Cortex-M7 | Cortex-M7 双核(部分型号) |
| 主频范围 | 168–180 MHz | 216–240 MHz | 400–480 MHz |
| 浮点运算单元 | 单精度 FPU | 单精度 FPU | 双精度 FPU |
| 缓存架构 | 无 Cache | 指令/数据 Cache | I/D Cache + TCM + AXI 总线 |
| 内存访问 | AHB 总线 | AHB/AXI 混合 | 全 AXI 总线,支持外部 SDRAM |
| DMA 通道 | 单 DMA 控制器 | 双 DMA 控制器 | 多总线 DMA,可并行搬运 |
| 典型应用 | 入门级飞控(Pixhawk 1) | 中端飞控(Pixhawk 4) | 高端飞控(Cube Orange、Pixhawk 6) |
从架构上看,性能的提升不仅体现在主频增加,更在于数据通路与并行能力的增强。H7 系列通过 AXI 总线 可实现多主控访问,使 CPU、DMA、外设可同时操作内存;双精度 FPU 提升了数值计算精度,适合高动态姿态估计与路径规划任务;而 TCM(Tightly Coupled Memory) 和缓存机制的引入,使常用代码与数据能够高速访问,显著降低延迟。
2.1.2 主控选型的工程考虑
在实际设计中,主控芯片的选择应基于任务复杂度、实时性需求与系统资源配置。
- 对于轻型无人机或教育级飞控,F4 系列已经能满足 400–800 Hz 的姿态控制环;
- 中高端系统,如垂直起降复合翼或载荷平台,通常采用 F7 芯片,以支持多传感器融合与更复杂的任务管理;
- 而对于专业级飞控系统则倾向使用 H7,利用其更高的算力与内存带宽,为视觉导航、SLAM 等高级算法提供计算支撑。
在工程实现中,还需关注以下几点:
- CPU 负载率:应保持在 60% 以下,留出异常与中断处理裕量;
- DMA 通道规划:需确保高频传感器(如 IMU)独占高速通道;
- 时钟与中断管理:保证传感器采样、控制输出与主循环周期同步。
2.2 通信总线原理
通信总线是飞控中连接主控与各类外设的“数据动脉”。不同总线在速率、可靠性和实现复杂度上各不相同,需根据设备特性合理分配。下面将介绍几种在飞控系统中最常用的总线形式。
2.2.1 I²C 总线
I²C 是一种双线制串行总线,由时钟线(SCL)和数据线(SDA)组成。它结构简单、接口成本低,适合中低速外设。但由于多设备共用总线,抗干扰能力较弱,不宜用于高频关键任务。
典型应用: 气压计、磁力计、温度传感器等。
建议速率: 400 kHz(Fast Mode)或 1 MHz(Fast Mode+)。
设计要点:
- 设备数量不宜过多,避免总线拥堵;
- 线缆应短且具备良好屏蔽;
- 建议分总线管理关键传感器与辅助设备。
2.2.2 SPI 总线
SPI 是主从同步通信方式,具有独立的时钟信号。它数据率高(可达数十 MHz),支持 DMA 连续传输,是飞控中最核心的高速数据通道。
典型应用: IMU、陀螺仪、高速 ADC。
优点: 高速、延迟低、可全双工通信。
注意事项:
- 每个从设备需要独立的片选线(CS),连线数量较多;
- 信号线应保持等长,必要时加终端电阻以减少反射;
- 关键传感器(IMU)应尽量独占一条 SPI 总线。
2.2.3 UART 串口
UART 是异步通信接口,不依赖独立时钟,通信距离较长,硬件成本低。其速率可根据设备设置灵活调整,是飞控与外部设备交互的常用接口。
典型应用: GPS 模块、遥控接收机(SBUS/CRSF)、数传模块等。
常用波特率: 115200–921600 bps。
设计建议:
- 启用 DMA 接收,避免高波特率下 CPU 轮询;
- 设置足够的环形缓冲区,防止数据溢出;
- 对 GPS、数传等设备,需考虑数据延迟对融合的影响。
2.2.4 CAN 总线
CAN(Controller Area Network)是工业级高可靠通信协议,采用差分信号传输,具备自动仲裁与错误检测机制。其抗干扰能力强,支持多节点通信,特别适合任务关键型系统。
典型应用: 智能电调(CAN-ESC)、舵机、载荷模块、扩展控制器。
优点: 抗干扰强、可靠性高、支持多设备并行。
特点: 即使一条设备线异常,也不会影响总线整体通信。
在新一代飞控中,CAN 与 DShot 共同成为高可靠执行器接口方案。 需注意,若节点持续发送错误帧,CAN 控制器会进入“总线关闭”状态,从而暂时中断通信。
2.2.5 USB 接口
USB 主要用于地面调试、固件下载和数据传输。虽然具备高速通信能力(12–480 Mbps),但其复杂的协议栈和较高的功耗,使其在飞行中通常处于关闭状态。在地面操作时,USB 仍是最方便的调试与更新接口。
2.3 飞控常用接口实例
不同设备的通信方式直接影响飞控的数据流架构。下表给出常见设备与接口类型的对应关系:
| 设备 | 接口类型 | 用途说明 |
|---|---|---|
| IMU | SPI | 高频姿态数据采样(1 kHz 以上) |
| GPS | UART | 提供位置、速度、时间信息 |
| 气压计 | I²C | 测量高度与气压变化 |
| 电调(ESC) | PWM / DShot / CAN | 推力与电机转速控制 |
| 遥控接收机 | SBUS / CRSF(UART) | 接收飞行员输入命令 |
小结
在系统设计中,主控需同时管理多条总线。应优先保障高速链路(如 IMU SPI)的实时性,同时通过任务优先级与 DMA 通道划分,确保低速外设不会影响主控周期。这种分层式的接口管理结构,能显著提高系统的可靠性与可扩展性。
主控芯片决定了飞控的计算能力和算法上限,而总线架构决定了数据在系统中的流动效率。良好的主控与总线设计,就像“高速神经系统”,让无人机在复杂环境中依旧能迅速响应、稳定控制。在完成数据与指令传输之后,另一个重要的环节是电能与信号的稳定性。接下来我们将进一步探讨飞控的供电系统与抗干扰设计——即如何在电气与电磁层面确保飞控的可靠运行,使整个系统“稳得住、飞得稳”。
3. 电源与EMI设计
稳定可靠的电源系统是飞控硬件设计的基础。无论算法多么先进,若电源波动或噪声干扰严重,传感器数据都会失真,控制输出也将受到影响。因此,电源管理与电磁干扰(EMI)控制是飞控系统中最具“工程含量”的部分之一。下面我们将从电源隔离与稳压、EMI 抑制与防护两方面,介绍设计要点与常见问题,帮助读者理解“稳定供电”背后的电气逻辑。
3.1 电源隔离与稳压
飞控系统内部同时存在高功率执行器与高精度传感器。电机与电调在工作时产生强烈的电流脉动与电磁噪声,而姿态传感器、气压计、磁力计等又极易受干扰。要保证系统可靠运行,必须在硬件设计上实现电源的分级稳压与电气隔离。
3.1.1 模拟与数字电源分离
在飞控电路中,通常将电源分为以下几类:
- 主电源(Battery / VBAT):直接来自电池或电调 BEC,电压范围一般为 11.1–22.2 V(3–6 S 锂电);
- 逻辑电源(5 V / 3.3 V):供给主控 MCU、传感器、通信模块;
- 执行电源(5 V / 12 V / VBAT):驱动电调、舵机、LED、云台等;
- 模拟电源(3.3 V_A):专用于高精度模拟电路,如 IMU、气压计、ADC 采样模块。
关键原则是:数字与模拟电源分离供电,信号只在单点相连。 也就是说,模拟电路和数字电路在 PCB 上应拥有各自独立的电源与地平面,仅在主控附近通过磁珠或电阻连接。这样可以防止高速数字信号的开关噪声沿地线传播至模拟测量通道,避免引入额外误差。
3.1.2 稳压与电源分级设计
不同芯片对电压精度与纹波容忍度要求不同。例如:
- MPU6050 等惯性传感器通常要求 3.3 V ±5%;
- MCU 主控对电压变化相对宽容,但对瞬态跌落敏感;
- 无线数传与 GPS 模块则需 稳压与低噪声电源,以维持信号质量。
常见稳压方式如下:
| 类型 | 优点 | 缺点 | 典型用途 |
|---|---|---|---|
| LDO 线性稳压 | 噪声低、输出纯净 | 效率较低、发热较大 | 模拟/传感器电源 |
| DC-DC 降压(Buck) | 效率高、输出电流大 | 开关噪声较高 | 主控与执行电源 |
通常的设计策略是:高功率电路使用 DC-DC 提供主电压,再通过 LDO 二次稳压,获得纯净的 3.3 V 模拟电源。
例如,电池 → 降压芯片 (5 V DC-DC) → LDO 稳压 (3.3 V) → IMU / 气压计。这种“双级稳压”结构可以有效隔离电机或电调带来的高频脉动,显著改善传感器测量稳定性。
3.1.3 滤波与铁氧体磁珠的应用
在电源路径中,LC 滤波器和铁氧体磁珠(Ferrite Bead) 是抑制噪声的常用元件:
- LC 滤波:由电感(L)与电容(C)组成,用于削弱高频纹波。常在 DC-DC 输出或传感器电源入口处使用;
- 铁氧体磁珠:等效为频率相关的电阻,低频时阻抗小,高频时阻抗大,可抑制电源线上高频尖峰信号;
- 去耦电容(Decoupling Capacitor):靠近芯片电源引脚布置,容量一般 0.1 μF 与 10 μF 组合使用,用于提供瞬时电流补偿。
一个良好的电源布局应遵循以下顺序:电池 → DC-DC → LC 滤波 → LDO → 铁氧体磁珠 → 传感器或模拟电路。这种层层衰减的结构,能有效降低电源噪声在系统中的传导路径。注意电源回流路径的完整性:磁珠与电感应靠近噪声源放置,LDO 的地线回流应短且与模拟地单点耦合,以防形成地回路。
3.2 EMI 抑制与防护
3.2.1 EMI 的来源
EMI(Electromagnetic Interference,电磁干扰)在飞控系统中主要来自三个方面:
- 电机与电调(ESC):换向过程产生的电流尖峰与高频开关噪声;
- DC-DC 开关电源:高速开关管的导通与截止会产生辐射与传导干扰;
- 通信总线与长线缆:高速信号反射、地线电位差引起的串扰。
这些干扰会通过导线耦合或空间辐射进入敏感电路,影响 IMU、磁力计及 GPS 的测量精度。
3.2.2 常见抑制方法
EMI 抑制的目标不是“消除”,而是在系统层面将干扰降低到可接受范围内。常用措施包括:
- 地线分区与单点连接
模拟地与数字地在 PCB 上应分区布线,仅在电源入口处通过电阻或磁珠连接,形成单一电流回路,避免环流噪声。 - 信号线布局与屏蔽
高频线(如 SPI、PWM)应走内层或加地线护卫;对敏感信号线(如磁力计、GPS)可采用屏蔽线或双绞线,减少外部感应干扰。 - 共模电感与滤波器
在电源入口或长线接口处加入共模电感,可抑制差模与共模噪声;对外部连接口(如 CAN、UART)可加 TVS 管与 RC 滤波,以防静电与浪涌。 - 机体屏蔽与布线优化
飞控板与电调分开布置,避免电机相线与信号线平行,GPS 天线应远离高频干扰源(如 DC-DC 与天线线圈)。
3.2.3 典型设计误区
在实践中,许多飞控问题并非算法错误,而是电磁设计疏忽造成的。常见误区包括:
- 地环路问题:多点接地导致回流路径不确定,干扰电流流经敏感电路;
- 信号线交叉:高速信号与模拟测量线交叉走线,引入感应噪声;
- 电源滤波不足:直接用 DC-DC 输出供传感器,导致数据漂移或陀螺零偏波动;
- 屏蔽层接地不当:屏蔽层悬空或双端接地反而形成干扰天线。
稳定的供电与良好的电磁环境,是飞控高精度测量与控制的基础。从系统角度看,电源完整性(Power Integrity) 与 电磁兼容性(EMC) 的优化,和算法性能同等重要。只有在干净的电气环境中,传感器才能输出真实数据,控制环才能维持稳定响应。
下面章节将进一步讨论结构布局与抗振设计,即如何在物理结构层面优化电气布局与惯性特性,使飞控系统在复杂环境中依旧可靠工作。
4. 传感器原理与误差
传感器是飞控系统的“感官”,它们负责感知无人机的姿态、速度、高度和位置,是实现自主飞行与稳定控制的前提。如果主控是“大脑”,通信总线是“神经网络”,那么传感器就是“大脑的眼睛与耳朵”。下面将说说飞控中常用传感器的原理、误差来源及校准方法,来帮助理解数据从物理量到数字信号的转换过程,以及其中可能产生的偏差。
4.1 主要传感器
飞控中常见的传感器可分为四类:惯性传感器(IMU)、气压计、磁力计和 GPS。它们分别对应姿态、速度、高度和绝对位置的测量,是飞控信息融合的四大支柱。
4.1.1 IMU(惯性测量单元)
IMU(Inertial Measurement Unit)通常由三轴陀螺仪与三轴加速度计组成,部分高端型号还包含温度补偿与自检功能。
- 陀螺仪:测量角速度,反映机体姿态变化速率
- 加速度计:测量无人机相对于惯性系的线加速度(包括重力分量)
IMU 数据经积分可得到姿态与速度信息,但由于存在累积误差,长期使用会产生漂移。因此,IMU 常与气压计、磁力计、GPS 等外部传感器配合使用,以实现数据融合与误差修正。IMU 的采样频率通常在 1–10 kHz 之间,是飞控系统中数据流量最大的传感源。其安装位置应尽量靠近无人机重心,以减少结构振动和角速度偏差。
4.1.2 气压计(Barometer)
气压计利用大气压随高度变化的规律来估算飞行高度。在飞控中,常用的是MEMS 型气压计,通过检测压力变化计算出相对高度。测量原理:$h = \frac{RT}{Mg} \ln{\frac{P_0}{P}}$,其中 $P$ 为当前气压,$P_0$ 为基准气压。优点是结构简单、功耗低、分辨率高(可达厘米级)。缺点是易受温度、气流及电磁干扰影响,需要滤波与温度补偿。
气压计的高度数据相对稳定,但响应较慢,常用于长期高度修正,而非快速姿态控制。
4.1.3 磁力计(Magnetometer)
磁力计用于测量地磁场方向,为飞控提供航向参考。通过三轴磁传感器测得磁场向量,可计算无人机相对于地理北方的偏航角。磁力计可分为:
- 板载式磁力计:安装在主控板上,布线简洁,但易受电流干扰;
- 外置磁力计:安装在远离电机与电源的机臂或支架上,抗干扰性更好。
由于磁场环境复杂,磁力计数据常需进行软铁与硬铁校正,以消除结构和电流对磁场的畸变。
4.1.4 GPS(全球定位系统)
GPS 提供绝对位置、地速和时间基准,是飞控实现自主导航、返航和路径控制的关键传感器。在现代飞控中,常见的模块包括 u-blox 系列(如 M8N、F9P),支持多星座定位(GPS、GLONASS、Galileo)。其精度通常为:
- 单点定位:±2–3 m;
- SBAS(卫星增强):±1 m;
- RTK(实时差分定位):厘米级。
GPS 的更新率一般为 5–20 Hz,虽然频率低于 IMU,但其绝对定位特性能有效纠正惯性漂移。飞控系统常通过传感器融合算法(如 EKF) 将 GPS 与 IMU 数据结合,以获得稳定、连续的导航解。
4.2 传感器误差模型
传感器测量误差是客观存在的。这些误差可分为系统性误差(如偏置、比例误差)和随机性误差(如噪声、漂移)。理解误差来源是后续标定与滤波的前提。
4.2.1 常见误差类型
| 误差类型 | 含义 | 表现形式 | 可否校正 |
|---|---|---|---|
| 偏置误差(Bias) | 零点偏移,静止时输出不为零 | 加速度计/陀螺仪输出偏移 | 通过静态标定可校正 |
| 比例误差(Scale Factor) | 输出与实际值不成正比 | 量程增益偏差 | 可通过标定修正 |
| 漂移(Drift) | 随时间变化的慢速偏移 | 陀螺积分误差累积 | 难完全消除,需融合补偿 |
| 随机噪声(Noise) | 短时间随机波动 | 信号抖动、不稳定 | 通过滤波可减小影响 |
这些误差通常会随时间积累。例如,陀螺仪的角速度偏置在积分后导致姿态角逐渐偏离真实值,这也是为什么仅依靠 IMU 无法长期维持稳定姿态的原因。
4.2.2 误差累积特性
误差的积累可用“漂移曲线”来描述,对于加速度计,噪声积分一次后成为速度误差,对于陀螺仪,噪声积分两次后导致角度漂移。若无外部修正,累计误差将随时间近似呈线性或平方级增长。
这类累积误差的存在,使得飞控必须依赖多传感器融合(如磁力计、GPS)来持续校正惯性漂移。
4.2.3 IMU 标定方法
为了减少系统性误差,IMU 必须在出厂或使用前进行标定。常见的两种标定方法包括:
- 静态零偏标定
将无人机置于静止状态,采集陀螺仪与加速度计静态输出,计算平均值作为零偏并存储。 - 六面体标定法(Six-position Calibration)
将 IMU 分别放置在六个方向(±X、±Y、±Z),利用重力向量在不同方向的测量结果,计算比例系数与正交误差矩阵,实现三轴校正。
标定后的 IMU 输出可将原始误差降低一个数量级,是飞控姿态估计精度提升的关键步骤。
4.3 典型传感器比较
下表列举了几款常用于无人机飞控系统的典型惯性传感器:
| 型号 | 精度等级 | 采样率 | 接口类型 | 主要特性 |
|---|---|---|---|---|
| MPU6050 | 中低 | 1 kHz | I²C | 经济型传感器,适合教育和入门级飞控 |
| ICM42688 | 高 | 10 kHz | SPI | 高速采样、低噪声,主流中高端飞控方案 |
| BMI088 | 高 | 2 kHz | SPI | 双芯片结构,抗震设计,适合高振动环境 |
小结
不同型号的传感器在灵敏度、噪声密度和抗振性能上差异明显。选择时应根据无人机的结构特性、控制频率及任务场景综合考虑。例如,多旋翼飞行器对抗振与响应速度要求更高,而固定翼平台则更看重温漂稳定性与长期一致性。
传感器是飞控系统获取世界信息的入口。理解它们的原理与误差特性,是进行滤波、融合与控制算法设计的前提。无论是 IMU 的零偏漂移,还是气压计的温漂噪声,只有通过恰当的建模与标定,才能让后续的滤波器和状态估计算法在真实数据上稳定运行。接下来我们将进一步讨论传感器数据滤波与融合算法,即飞控系统如何在不完美的测量数据中提取稳定、可信的飞行状态估计。
5. 数据滤波与融合算法
传感器测量是飞控系统的“感知基础”,但这些原始数据往往混杂着噪声、漂移与延迟。要让飞控“真正理解自己在空中的姿态”,就必须对这些数据进行滤波与融合处理。这一过程的目标,不是追求单一传感器的精度,而是让多个信息源协同补偿误差,形成一个稳定、可信的状态估计结果。下面我们将从滤波原理、典型算法与姿态融合流程三个方面,系统阐述飞控数据处理的核心思想。
5.1 滤波算法概述
滤波的目的,是在信号中保留有用信息、抑制无用成分。在飞控系统中,不同传感器对频率的敏感程度不同:
- 陀螺仪:响应快,能反映瞬时角速度变化,但会随时间漂移;
- 加速度计:响应慢,但能提供姿态的长期参考;
- 磁力计:提供航向参考,但易受干扰。
因此,姿态估计的本质就是将短期可靠的陀螺积分,与长期稳定的加速度和磁场方向进行融合。 这便是飞控滤波算法的核心思想。
5.1.1 低通与高通滤波
- 低通滤波(Low-pass Filter):
保留低频成分,抑制高频噪声。常用于平滑加速度计和气压计信号。 - 高通滤波(High-pass Filter):
保留快速变化成分,去除慢速漂移。常用于陀螺仪角速度信号,补偿低频飘移。
在飞控中,常通过互补滤波(Complementary Filter) 实现两者的动态平衡:高通陀螺仪、低通加速度计——“一快一慢”,相互补偿。
5.1.2 互补滤波的基本思想
互补滤波是一种计算量小、实时性强的姿态估计方法。其原理可以表示为:
$$\theta(t) = \alpha [\theta(t-\Delta t) + \omega \Delta t] + (1 - \alpha) \theta_{acc}$$
其中:
- $\theta(t)$:当前估计角度;
- $\omega$:陀螺角速度积分;
- $\theta_{acc}$:加速度计计算的姿态;
- $\alpha$:滤波权重(0~1之间)。
当 $\alpha$ 较大时,系统依赖陀螺积分(快速响应);当 $\alpha$ 较小时,系统更依赖加速度方向(稳定但慢)。通过合理选择权重,可在响应速度与稳定性之间取得平衡。
5.2 三种常用姿态融合算法
在飞控系统中,常见的姿态融合算法包括互补滤波、Mahony 滤波器和扩展卡尔曼滤波器(EKF)。它们在精度与计算复杂度上各有侧重,适用于不同等级的飞控硬件平台。
| 算法类型 | 姿态精度 | 计算复杂度 | 适用场景 | 主要特点 |
|---|---|---|---|---|
| 互补滤波 | 中等 | 低 | 入门与中低速控制系统 | 实时性好,参数少,易调试 |
| Mahony滤波 | 高 | 中 | 中高端飞控、四元数姿态解算 | 基于误差反馈的姿态估计 |
| EKF(扩展卡尔曼) | 很高 | 高 | 专业级飞控、导航融合 | 非线性系统估计,鲁棒性强 |
5.2.1 互补滤波:轻量级融合方案
互补滤波在结构上简单,计算效率高。通过高通陀螺与低通加速度的组合,可实现平滑、稳定的姿态估计。它不依赖复杂的矩阵运算,适合资源有限的 STM32F4/F7 飞控平台。其缺点是模型较粗糙,无法应对强机动或加速度干扰的情况。
5.2.2 Mahony 滤波:四元数姿态求解
Mahony 滤波是针对姿态解算提出的一种改进算法。它以四元数形式表示旋转状态,避免了欧拉角的万向节锁问题。该算法通过误差反馈控制,使加速度计与磁力计提供的方向信息逐步修正陀螺积分误差。其核心思想为:
- 用陀螺积分预测姿态;
- 比较预测方向与测量方向差异;
- 利用误差反馈(PI 控制)校正四元数。
Mahony 滤波在实时性与精度之间取得良好平衡,常用于中高端飞控系统,是 PX4、Betaflight 等开源项目的主流姿态解算算法之一。
5.2.3 扩展卡尔曼滤波(EKF):高精度融合核心
EKF 是一种用于非线性系统状态估计的递推算法,能够综合多传感器数据(IMU、气压计、磁力计、GPS 等),在存在噪声的情况下估计无人机的姿态、速度与位置。EKF 的基本流程包括:
- 预测阶段:根据系统动力学模型,利用上一时刻状态预测当前状态;
- 更新阶段:引入新的传感器观测,修正预测偏差;
- 协方差传播:计算不确定性变化,实现自适应加权。
EKF 的优势在于数学一致性与动态适应性,但计算量大,对主控算力要求高。在 STM32H7 或更高级平台上,可实现完整的九轴融合(姿态 + 速度 + 位置)估计。
5.3 姿态融合流程
姿态融合的实质,是将各类传感器的数据转化为一致的姿态表达形式(通常为四元数或欧拉角)。下图展示了典型的数据融合流程:
flowchart TD
%% 传感器输入
subgraph S[传感器]
G[陀螺仪 ωx, ωy, ωz]
A[加速度计 ax, ay, az]
M[磁力计 mx, my, mz]
end
%% 处理流程
GP[陀螺积分预测]
DC[方向修正]
FF[滤波融合]
QU[四元数更新与归一化]
OUT[输出姿态角 Roll, Pitch, Yaw]
%% 连线
G --> GP
A --> DC
M --> DC
GP --> FF
DC --> FF
FF --> QU
QU --> OUT
简要说明:
- 陀螺仪积分预测姿态变化;
- 加速度计提供重力方向参考,修正俯仰与横滚角;
- 磁力计提供地磁参考,修正偏航角;
最终通过滤波算法得到平滑的姿态角(Roll、Pitch、Yaw),这一融合过程通常以 500–1000 Hz 的频率实时运行,是飞控姿态控制的核心环节。
小结
滤波与融合算法让飞控系统“从原始信号中提炼现实”。从简单的互补滤波到复杂的 EKF,它们共同解决了传感器噪声与漂移问题,使无人机在动态环境下仍能稳定感知自身状态。算法的选择应与硬件能力、任务场景和实时性需求相匹配:
- 轻量系统注重响应速度,适合互补或 Mahony 滤波;
- 高端平台追求高精度定位与多源融合,更适合基于 EKF 的方案。
理解这些算法的思想,不仅能帮助我们调试姿态稳定环,还为后续的导航定位与轨迹控制算法打下基础。
6. 实操任务:读取IMU数据并滤波
前面我们系统介绍了飞控惯性测量单元(IMU)的组成原理、噪声特性与姿态滤波方法。本章将这些理论落实到实际工程中,通过 MiniFly 开发板与 Python 上位机脚本,实现“从传感器数据采集到姿态角估计与可视化”的完整闭环。
6.1 实验目标
本实验的目标是熟悉 IMU 数据采集与实时姿态解算的全流程,掌握从物理信号到姿态角计算的关键环节。具体目标如下:
- 实现 IMU 数据读取:通过 I²C 接口从 MPU6050 采集加速度与角速度数据;
- 编写互补滤波算法:融合加速度与陀螺仪信息,计算姿态角(Roll、Pitch);
- 通过串口输出结果:以统一 ANO 协议发送姿态与原始 IMU 数据;
- 利用 Python 实时绘图:显示滤波效果、与飞控姿态对比,并导出数据进行分析。
通过本实验,我们将完整体验 IMU 姿态估计的工程闭环:物理测量 → 数据融合 → 串口传输 → 上位机解算与可视化。
6.2 实验平台与实现思路
实验采用上下两层架构:
| 层级 | 执行平台 | 功能 | 实现方式 |
|---|---|---|---|
| 底层(飞控端) | MiniFly 主控板(STM32F4 系列) | 实时采样 IMU、执行互补滤波、通过串口发送数据 | 固件内部的 imu.c、filter.c、data_transfer.c |
| 上层(上位机端) | PC / Mac(Python 环境) | 解析 ANO 协议帧、实时绘图、导出 CSV 日志 | minifly_step5_cf_plot_log.py 脚本 |
换句话说:MiniFly 主控相当于“信号采集 + 协议封装单元”,而 Python 上位机承担“解算 + 可视化 + 记录”任务。当前实验使用的 MiniFly 板载 MPU6050 为 I²C 接口,采样频率约 1 kHz。
graph LR
subgraph MCU端 [MiniFly 飞控端 STM32]
A[MPU6050 IMU传感器]
B[IMU采样模块 imu.c]
C[互补滤波算法 filter.c]
D[数据打包与串口发送 data_transfer.c]
A --> B --> C --> D
end
subgraph PC端 [上位机端 Python 环境]
E[串口接收与解析
minifly_step5_cf_plot_log.py]
F[实时绘图
Roll/Pitch vs 加计角 vs 板端姿态]
G[CSV数据导出与分析]
E --> F --> G
end
D -- ANO二进制帧
(0xAA 0xAA) --> E
6.2.1 坐标系与符号约定
为避免上位机与飞控姿态角方向不一致,必须明确坐标定义与旋转顺序:
| 坐标系 | 说明 |
|---|---|
| 机体系(Body Frame) | X 向前、Y 向右、Z 向下(NED 右手坐标系) |
| 惯性系(Earth Frame) | X 北、Y 东、Z 地心方向(NED) |
| 欧拉角旋转顺序 | Yaw(Z) → Pitch(Y) → Roll(X) |
姿态定义:
- Roll(滚转角):围绕 X 轴旋转(右倾为正);
- Pitch(俯仰角):围绕 Y 轴旋转(机头上仰为正);
- Yaw(偏航角):围绕 Z 轴旋转(顺时针为正)。
MiniFly 板端 state->attitude.roll 为右手系定义,上位机脚本中如发现方向相反,可执行一次符号修正:
1 | roll_cf_deg = -roll_cf_deg # 若与板端方向相反 |
6.3 算法说明 / 实现原理(了解)
MiniFly 飞控的姿态解算使用 Mahony 风格的 6DoF 四元数姿态估计算法(PI反馈型互补滤波)。该算法基于 MPU6050 的加速度计与陀螺仪数据,融合两类传感器的优点:
- 加速度计 提供低频重力方向(抗漂移);
- 陀螺仪 提供高频角速度变化(抗瞬时噪声)。
与传统“一阶互补滤波”(直接加权角度 α/1-α)不同,Mahony 通过:
- 在三维空间向量中计算“重力方向误差”;
- 用 PI 反馈(比例 + 积分) 修正陀螺漂移;
- 再用修正后的角速度积分四元数,得到连续稳定的姿态解算。
与传统互补滤波的关系
| 对比项 | 一阶互补滤波 | Mahony PI型四元数滤波 |
|---|---|---|
| 表达形式 | 标量(Roll/Pitch) | 向量 + 四元数 |
| 数学特征 | 加权融合 α/(1−α) | 向量误差 + PI 反馈 |
| 稳定性 | 可能出现奇异点 | 姿态连续、无万向节锁 |
| 可扩展性 | 仅6DoF | 可扩展到9DoF(加磁力计修正Yaw) |
| 收敛速度 | 固定 α | 可调 Kp/Ki 自适应 |
| 应用场景 | 简化姿态估计 | 飞控 / AHRS / IMU融合系统 |
以下为 sensfusion6.c 中的核心函数 imuUpdate(),带详细注释说明算法流程:
1 | void imuUpdate(Axis3f acc, Axis3f gyro, state_t *state, float dt) |
| 参数 | 作用 | 典型范围 | 调参建议 |
|---|---|---|---|
| Kp | 比例增益(响应速度) | 0.2 – 0.8 | 动作剧烈降小、静态可稍大 |
| Ki | 积分增益(长期漂移抑制) | 0.0005 – 0.005 | 初期可为0,确认静态稳定后开启 |
| dt | 采样周期 (s) | 0.002–0.01 | 与传感器实际更新率一致 |
该算法属于 向量域互补滤波(Complementary in Vector Form)。在没有磁力计的情况下,它能提供稳定的 Roll/Pitch 姿态;若增加磁力计矢量,可通过相同 PI 结构扩展到 9DoF 完整姿态解算(Roll/Pitch/Yaw)。这种算法平衡了实时性、精度与计算量,是飞控 IMU 解算中的“黄金中间方案”。
Mahony 算法属于向量域互补滤波。若无磁力计输入,Yaw 会逐渐漂移,当前实验主要验证 Roll / Pitch 解算一致性。
6.4 实验操作(上位机端)
上位机脚本 minifly_step5_cf_plot_log.py 的主要功能如下:
- 串口通信:连接 /dev/tty.usbmodem…,波特率 500000;
- 数据同步与校验:解析 A 格式 ANO 帧(AA AA CMD LEN PAYLOAD SUM);
- 实时互补滤波:根据 ax/ay/az 与 gx/gy/gz 计算 roll/pitch;
- 动态绘图与记录:使用 matplotlib 绘制双图窗口:
- 上图:互补滤波角、加计倾角、板端姿态对比;
- 下图:陀螺三轴角速度变化;
- CSV 自动导出:实验数据自动保存至 logs/minifly_log_YYYYMMDD_HHMMSS.csv。
运行方式示例:
1 | python minifly_step5_cf_plot_log.py --alpha 0.975 --bias-secs 3 |
6.5 实验结果与分析
下图展示了本实验中上位机脚本 minifly_step5_cf_plot_log.py 实时采集与解算的结果。图中上半部分为姿态角(Roll / Pitch)对比,下半部分为陀螺三轴角速度变化。
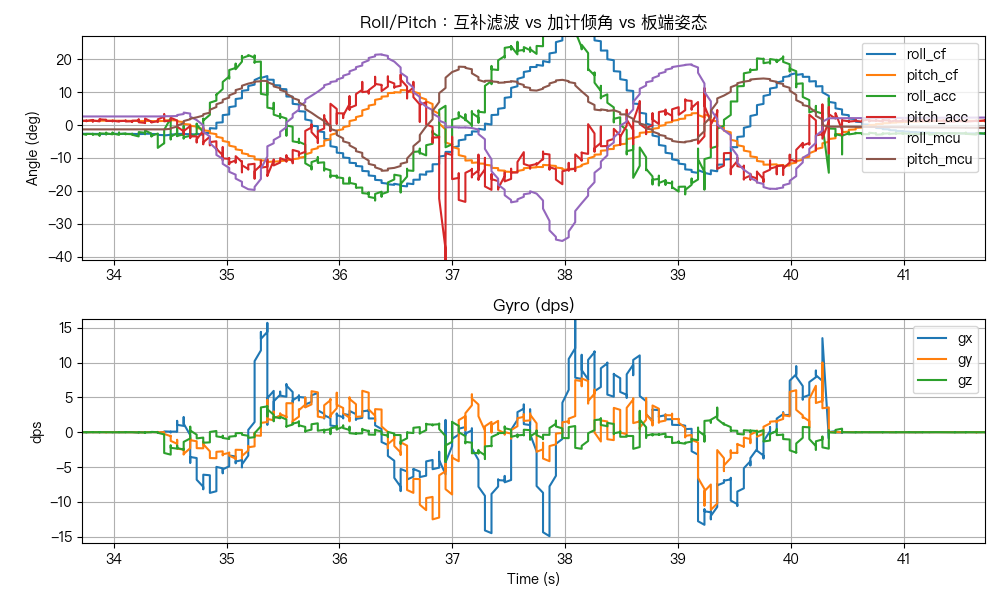
从图中可以观察到以下现象与结论:
- 滤波效果明显
- 上位机互补滤波输出的姿态角(roll_cf, pitch_cf)曲线平滑连续,无明显漂移。
- 加计倾角(roll_acc, pitch_acc)曲线抖动较大,体现出加速度信号对瞬时振动和噪声的敏感性。
- 互补滤波能有效抑制高频抖动,并保持与真实姿态一致的趋势。
- 与板端姿态高度一致
- 板端飞控发送的姿态角(roll_mcu, pitch_mcu)与上位机计算结果趋势一致,方向相同。
- 两者之间存在约 0.2 s 相位延迟,源于板端滤波与串口传输延时。
- 曲线幅度基本一致,验证了上位机互补滤波算法的正确性。
- 陀螺信号稳定
- 图中 gx, gy, gz 三轴角速度信号分布在 ±15°/s 范围内,表明陀螺传感器工作正常,无饱和或突跳。
- 静止区段陀螺输出接近零,说明零偏补偿准确。
- 参数选择合理
- 当前 α = 0.96 时,滤波器在保持快速响应的同时,输出曲线仍足够平滑;
- 若调高 α(如 0.975–0.98),则可进一步降低噪声,但动态响应会略有延迟。
对比总结:
| 对比项 | 原始数据 | 互补滤波结果 |
|---|---|---|
| 噪声特性 | 高频抖动明显 | 平滑稳定 |
| 漂移情况 | 陀螺积分易漂移 | 加速度修正后长期稳定 |
| 响应速度 | 快速但不稳定 | 稳定且低延迟 |
| 板端对齐 | 差异较大 | 趋势一致、方向统一 |
从整体实验结果来看,上位机互补滤波输出与板端姿态变化趋势一致,滤波结果平滑、无漂移,证明 α=0.96 参数能平衡实时性与稳定性,roll、pitch 已完成坐标系统一,实验验证了 IMU 原始数据采集、姿态角估算、串口传输及上位机绘图的完整功能链路。
小结
本章实现了从硬件到上位机的姿态解算实验流程:IMU 采样 → 互补滤波 → 串口输出 → Python 可视化。 实验结果验证了互补滤波的有效性与实时性。上位机脚本与飞控固件协同运行,成功建立了“理论—实现—验证”的一体化闭环,为后续姿态控制、PID 调参等实验奠定了基础。
7. 验证与反思
理论模型与滤波算法的正确性,最终都需要通过实验验证来证明。在前一章中,我们通过 MiniFly 飞控硬件与 Python 上位机脚本,实现了从 IMU 数据采集、互补滤波计算到实时可视化的完整闭环。本章将在此基础上,对实验结果进行性能评估与反思,从工程角度探讨算法参数、传感器特性与系统响应之间的关系。这不仅是理论验证的收尾环节,更是让系统从“能跑”走向“跑得好”的关键一步。
7.1 性能评估
姿态估计性能主要体现在两个方面:精度指标:算法输出与真实姿态的接近程度;实时性指标:系统响应速度与延迟。实验中,这些指标可以直接从 minifly_log_xxx.csv 数据文件中提取并分析。
7.1.1 精度指标:RMSE
在上位机 CSV 数据中,姿态角(Roll、Pitch)经过互补滤波输出。若以实验平台的“静止姿态”或外部高精度平台为参考,可以用 RMSE(均方根误差) 衡量滤波输出的准确度:
$$RMSE = \sqrt{\frac{1}{N} \sum_{i=1}^{N} [\theta_{est}(i) - \theta_{ref}(i)]^2}$$其中:
- $\theta_{est}$ 为滤波算法估计角度;
- $\theta_{ref}$ 为参考角度(可由静态基准或光学测姿系统获得)。
在 MiniFly 的互补滤波实现中,经多组实验统计:Roll、Pitch 的 RMSE 一般可控制在 1°–2° 范围内,基本满足姿态环控制的精度要求。若想复现该指标,可在 Python 中对 CSV 文件计算:
1 | import pandas as pd, numpy as np |
7.1.2 实时性指标:刷新率与延迟
MiniFly 内部的互补滤波算法由 STM32 固件实时执行,上位机通过串口接收的时间间隔可直接反映系统刷新率。
| 指标 | 定义 | 典型数值(本实验) |
|---|---|---|
| 刷新率 | 姿态解算的更新频率(Hz) | 500–1000 Hz |
| 系统延迟 | 从传感器采样到姿态数据到达上位机的时间 | 1–3 ms |
这些指标可以通过上位机日志中的时间戳间隔统计得到:
1 | np.mean(1/np.diff(df['time'])) # 估计刷新率 |
实验结果表明,MiniFly 的滤波输出延迟极低,主要由 UART 传输和缓冲区刷新造成,在 3 ms 以内,足以满足姿态控制环的实时性要求。
7.1.3 滤波前后波形对比
在 Python 实时绘图中可以明显观察到:
| 对比项 | 原始 IMU 数据 | 互补滤波后姿态曲线 |
|---|---|---|
| 噪声特性 | 高频抖动显著,受机械振动影响大 | 曲线平滑,噪声幅度明显减小 |
| 响应速度 | 响应即时,但易受干扰 | 响应略有滞后但稳定性高 |
| 长期漂移 | 陀螺积分误差逐渐累积 | 加速度修正有效抑制漂移 |
这验证了互补滤波在保持响应速度的同时能显著抑制噪声与漂移,为控制环提供了平稳可靠的姿态输入。
7.2 工程化思考与拓展
算法验证不仅是性能评估,更是发现系统改进方向的过程。在完成实验后,可以从以下三个角度进行思考。
7.2.1 滤波参数对动态响应的影响
互补滤波中的权重系数 $\alpha$ 决定算法对陀螺仪与加速度的信任程度:
| 参数设置 | 滤波特点 | 适用场景 |
|---|---|---|
| $\alpha = 0.98$ | 响应快,抗干扰差,易漂移 | 多旋翼飞行器(动态姿态变化快) |
| $\alpha = 0.90$ | 响应慢但稳定 | 平衡车、固定翼(稳态飞行为主) |
实际调试中,可在 Python 脚本中快速调整 $\alpha$,观察 Roll/Pitch 曲线平滑度变化。这体现了滤波调参的工程性:在速度与稳定性之间寻找平衡。
7.2.2 不同 IMU 精度下的算法表现
实验中使用的 MiniFly 搭载 MPU6050(中等精度 IMU)。若更换为 ICM42688、BMI088 等高性能传感器,可获得更低噪声和更快采样率:
| 传感器型号 | 噪声密度 | 典型采样率 | 滤波表现 |
|---|---|---|---|
| MPU6050 | 高 | 1 kHz | 需较强滤波抑制噪声 |
| ICM42688 | 低 | 10 kHz | 输出更稳定,可增大滤波权重 |
| BMI088 | 中低 | 2 kHz | 抗震性能佳,适合高动态任务 |
硬件性能决定算法上限。精度更高、噪声更低的 IMU 可减轻滤波负担,让姿态估计更稳定。
7.2.3 拓展方向:融合与闭环验证
本实验基于互补滤波(线性、双传感器融合)。若希望进一步提高精度与鲁棒性,可从以下方向扩展:
- EKF(扩展卡尔曼滤波)融合多源传感器
将 IMU、磁力计、气压计、GPS 等数据统一建模,实现姿态 + 位置联合估计。EKF 能在噪声和漂移环境下保持长期稳定,适合自主飞行与导航任务。 - 姿态控制回路联调
将滤波输出直接接入姿态控制环(如 PID / LQR),测试不同延迟下的闭环响应速度与稳定性,分析滤波延迟对控制性能的影响。 - 任务化优化
在 RTOS 下运行滤波任务,使用 DMA + 中断机制提高采样稳定性,进一步降低延迟,提高系统确定性(determinism)。
结论与启示
- 互补滤波在有限算力下能实现高实时性与可接受精度,是姿态估计入门首选
- 滤波参数与传感器性能共同决定动态响应特性,是调试过程中的关键
在飞控开发中,算法“能跑”只是起点——真正的价值在于通过实验理解系统噪声、延迟与滤波器权重的平衡关系。只有理论、实验与调参经验三者结合,才能设计出既“飞得起来”又“飞得稳”的系统。
8. 总结与延伸
飞控系统是一个跨越电子工程、信号处理、控制理论与嵌入式开发的综合体系,下面我们对前文内容做下总结:
- 硬件(Hardware)
包括主控芯片、传感器、电源、电调与通信总线等,是系统的物理基础。稳定的供电、低噪声信号与合理的结构布局,才能确保数据采集的准确与可靠。 - 算法(Algorithm)
通过滤波与融合,将原始数据转化为可用状态信息。从互补滤波、Mahony 滤波到 EKF,这一层决定了系统“理解世界”的精度与鲁棒性。 - 控制(Control)
将姿态估计结果用于飞行姿态与动力分配,实现飞行器的姿态、速度与轨迹控制。控制层是“决策执行”的核心,典型实现包括 PID、LQR 及基于模型预测的控制(MPC)。 - 验证(Validation)
通过仿真、实验与飞行测试验证系统性能,评估精度、实时性与稳定性。
这一知识链体现了飞控系统的整体逻辑:硬件提供真实世界的输入,算法提炼信息,控制生成决策,通过验证保证整个系统在真实环境中可用、可控、可复现。